
About
We develop mathematical models of environments and autonomous systems, analyze their properties, and design robot systems that leverage these insights to maximize performance. My work draws on a wide range of theoretical concepts in control, estimation, and autonomy to address challenges in marine robotics, including multi-vehicle adaptive sampling, multi-agent competitions and games, and control of highly modified vehicles.
Background
I have a PhD in Mechanical Engineering and Oceanographic Engineering from the MIT-WHOI Joint Program (2025), a MS in Mechanical Engineering from Johns Hopkins (2018), and a BS in Mechanical Engineering from Montana State (2011). I was a SMART Scholar and an MIT Presidential Fellow. I am also a licensed Professional Engineer (PE) with approximately seven years of industry experience as a machine design engineer.Open-source software
Maintainer of software for the Clearpath Heron USV fleet at MIT: Contributor:- MIT Lincoln Laboratory Trusted Autonomy
- West Point Robotics USV autonomy
Other software: Ongoing research areas and licensable code
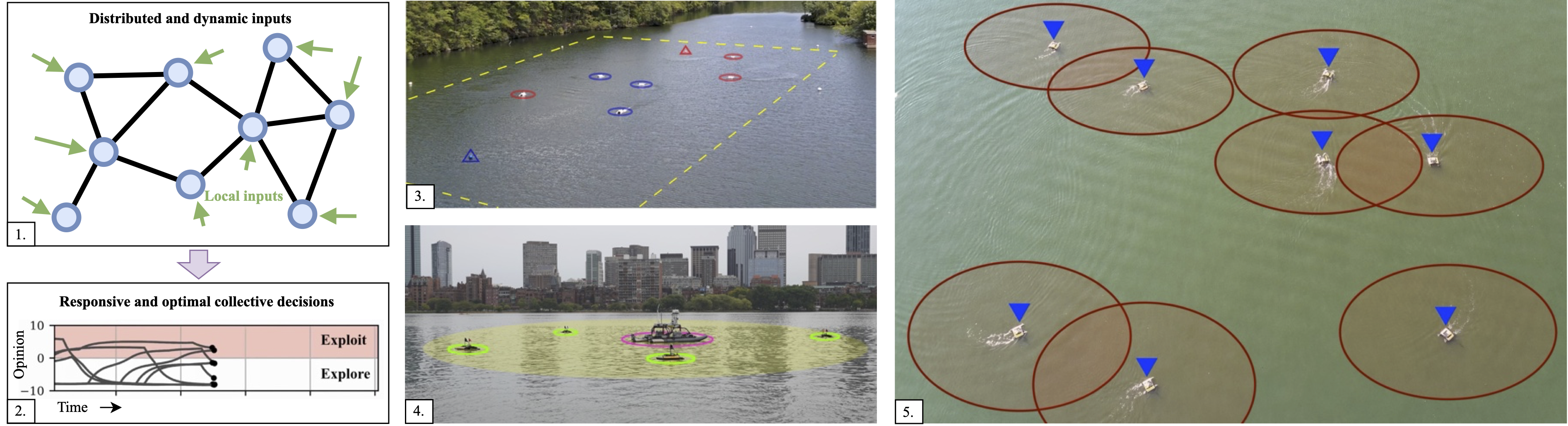
- moos-ivp-multi, a collection of baseline algorithms for distributed and decentralized autonomy. These capabilities can be composed into versatile, sophisticated multi-agent systems. They are built on the open-source MOOS-IvP codebase and are licensable through MIT TLO.
- Development of high-performance controllers for marine vehicles, including contributions to the DARPA LINC program. This includes control of a SAFE 29 Defender-class vessel at speeds exceeding 30 knots.
- Adaptive sampling methods for marine carbon dioxide removal (mCDR) validation. As of Spring 2026, this is an active area of research, with open-source releases planned.