
Research
Models
I use two types of models in my work.Environment Models
The first type of model captures the key properties of the environment (e.g., bathymetry, acoustic energy propagation) or the motion of a robot within that environment (e.g., underwater vehicle dynamics). These methods address the adaptive sampling problem, in which marine robots build models in real time and use them to determine where to sample to maximize efficiency. These models allow robots to interpret tangible environmental features in a quantifiable and useful way, while also estimating their own dynamics in real time to inform decision-making and control.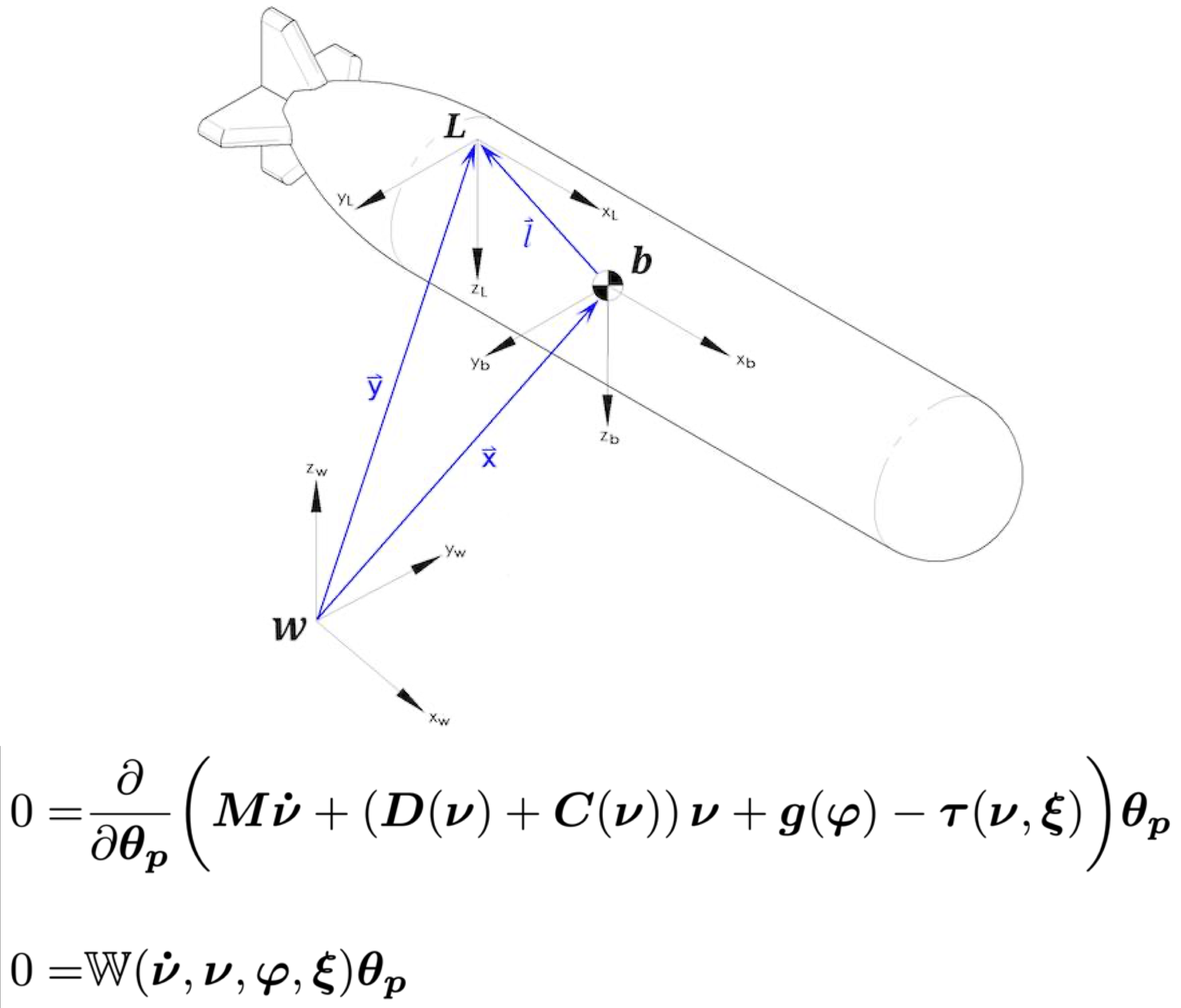
Models of vehicle motion with null space parameterizations for optimal and adaptive identification.
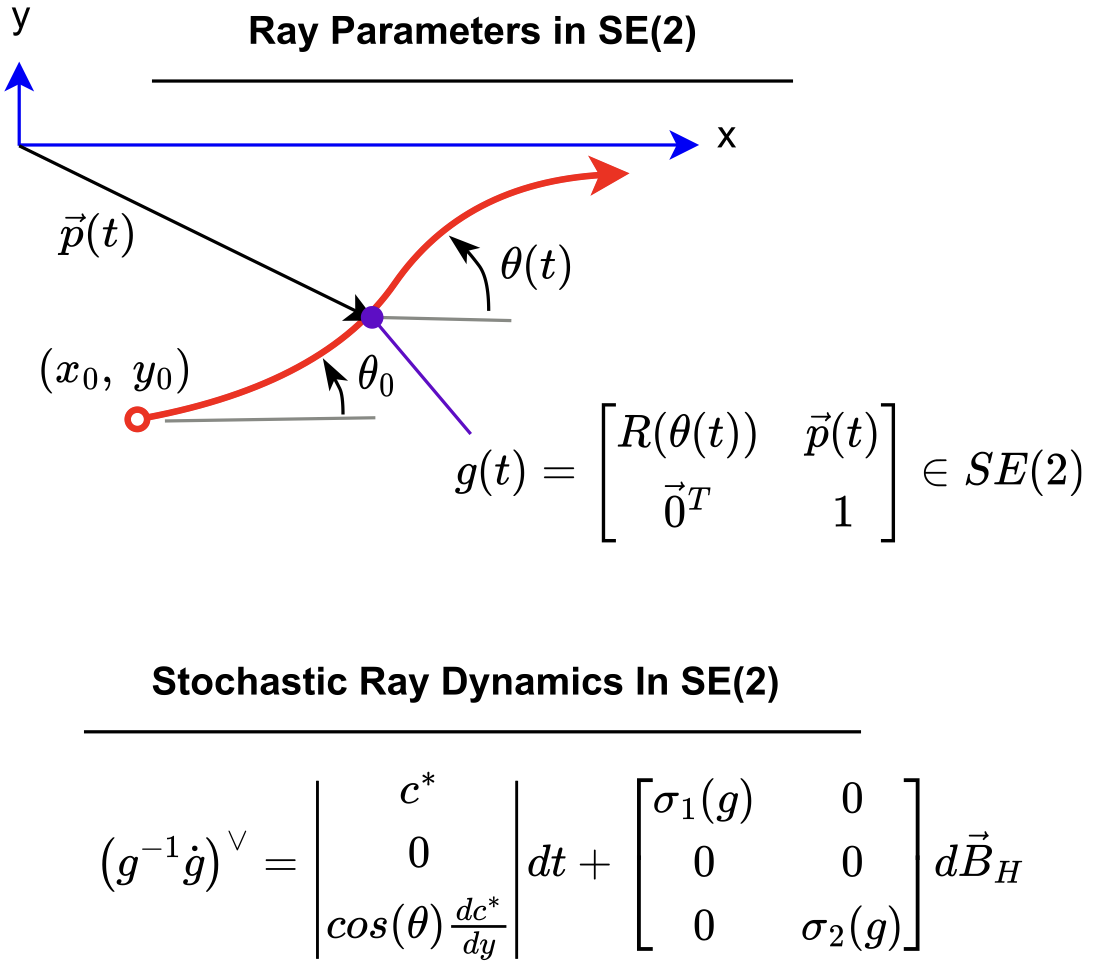
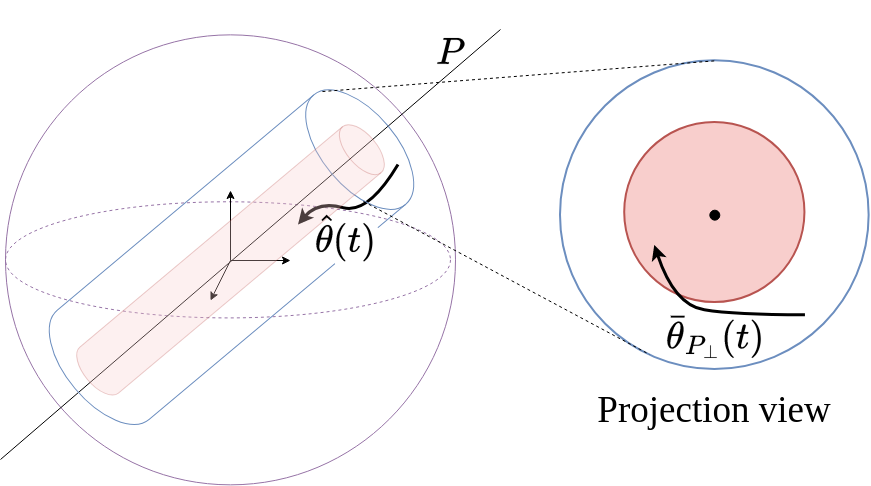
Geometric stochastic ray propagation using the special Euclidean group.
Autonomy Models
The second type of model captures the process of making a decision and determining how to adjust actuators to achieve that action. These methods span several foundational areas of artificial intelligence: planning, allocation, and control. With this understanding, robots can be equipped with intelligence to make effective decisions when interacting with the world.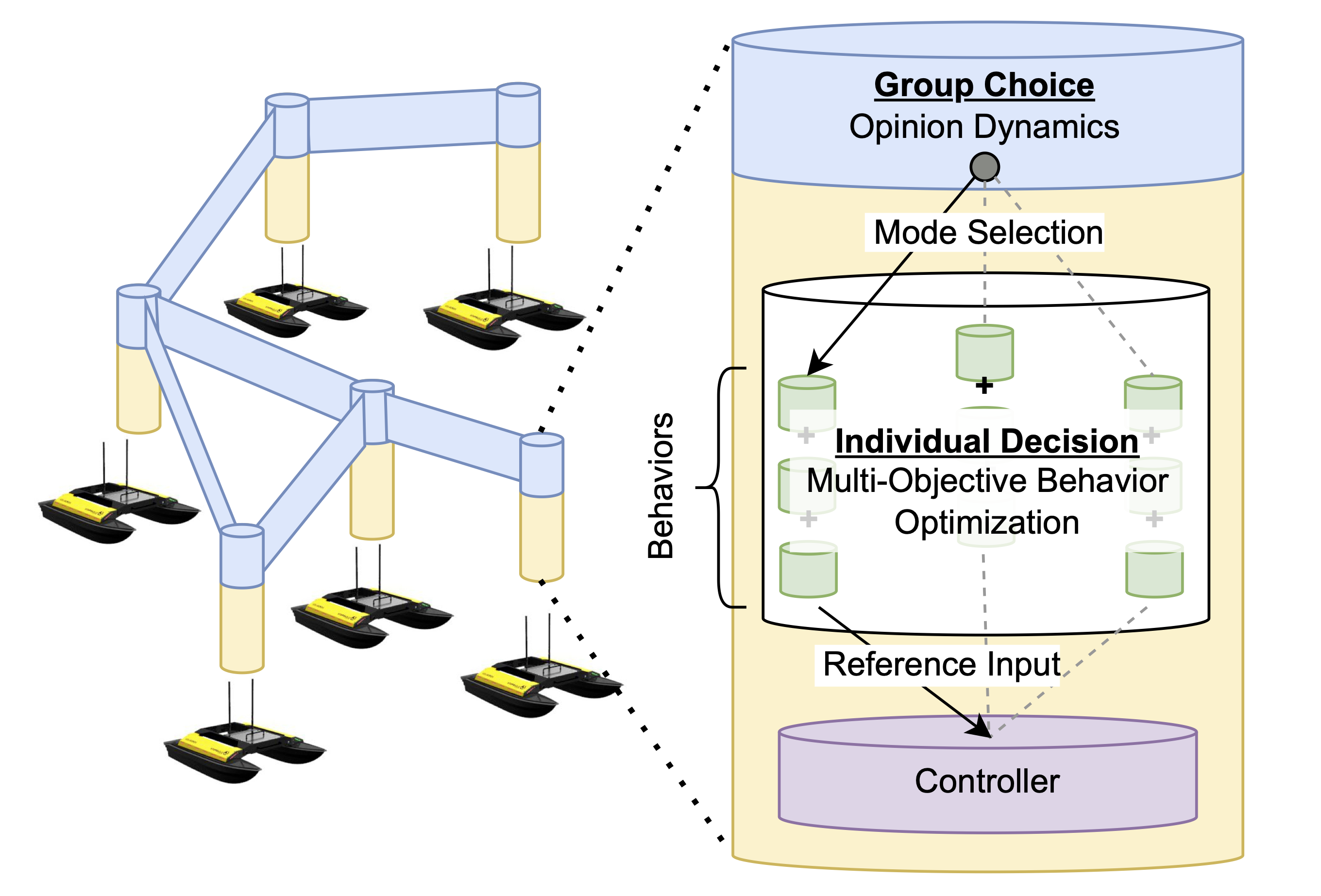
A hierarchical model of distributed multi-robot autonomy. The autonomy stack is replicated on each vehicle.
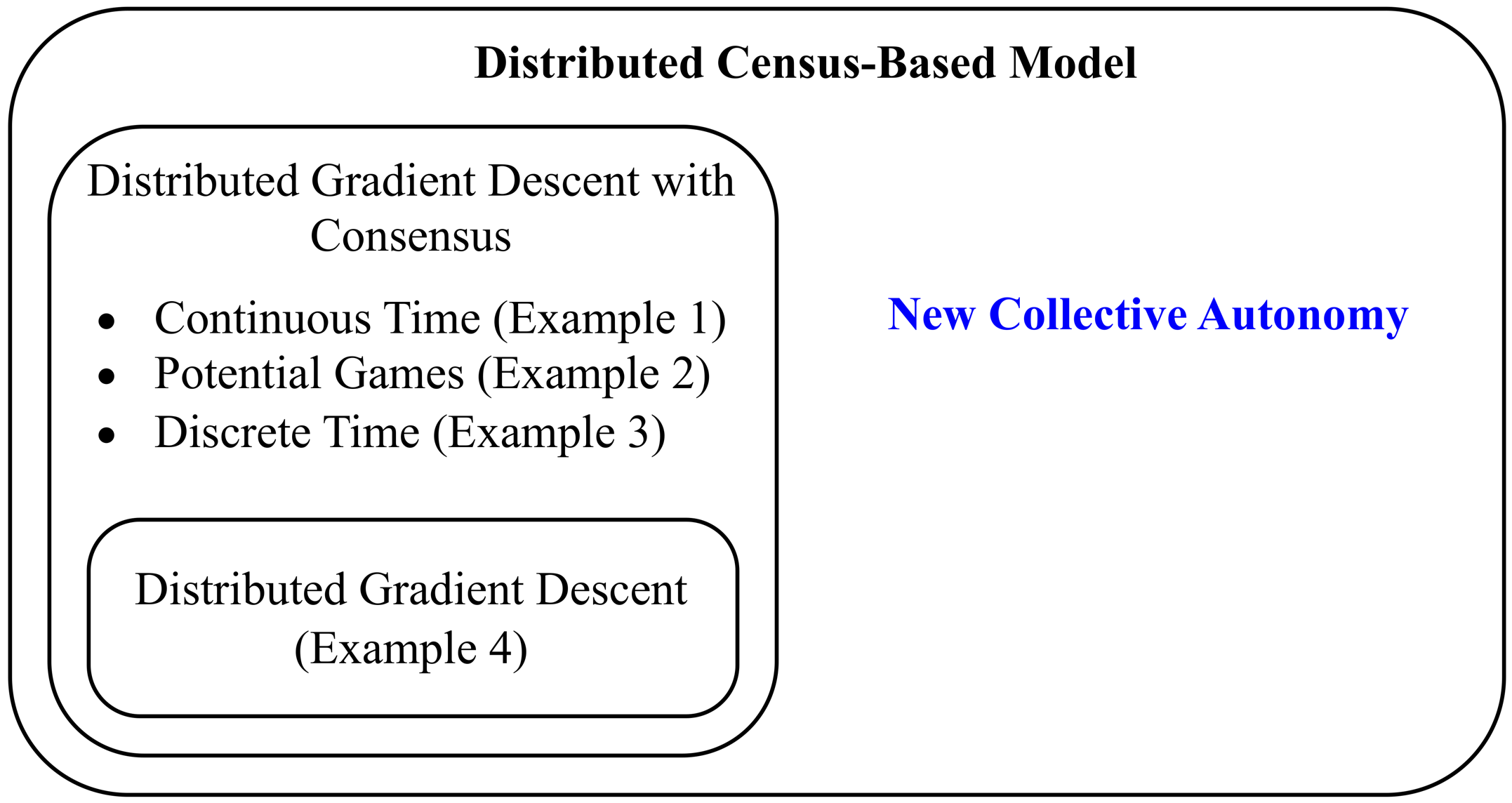
Relationship of this new model to existing methods.
Both Models Together
My work focuses on developing new models in both areas and integrating them together to maximize performance (e.g., minimizing survey time and extending the operational envelope). In particular, I am interested in teams of robots that can collectively build environmental models while simultaneously dividing into subteams and allocating tasks to best achieve goals such as sampling. All of these methods are decentralized or distributed, meaning there is no central controller or algorithm.Analysis
I use a range of analysis techniques to evaluate how well a model matches reality and to characterize performance limits. Mathematical analysis (sometimes called formal methods) allows us to be more certain about performance without relying on randomized simulation. To accomplish this, I use Lyapunov stability analysis, graph theory, contraction analysis, observability analysis, control barrier function (CBF)-based forward invariance arguments. I collaborate with others on projects were we use reachability analysis and ergodic analysis. Although models are never perfect, a key benefit of analysis is that we can often bound performance degradation (e.g., if the model error is ε, then performance degrades by at most δ).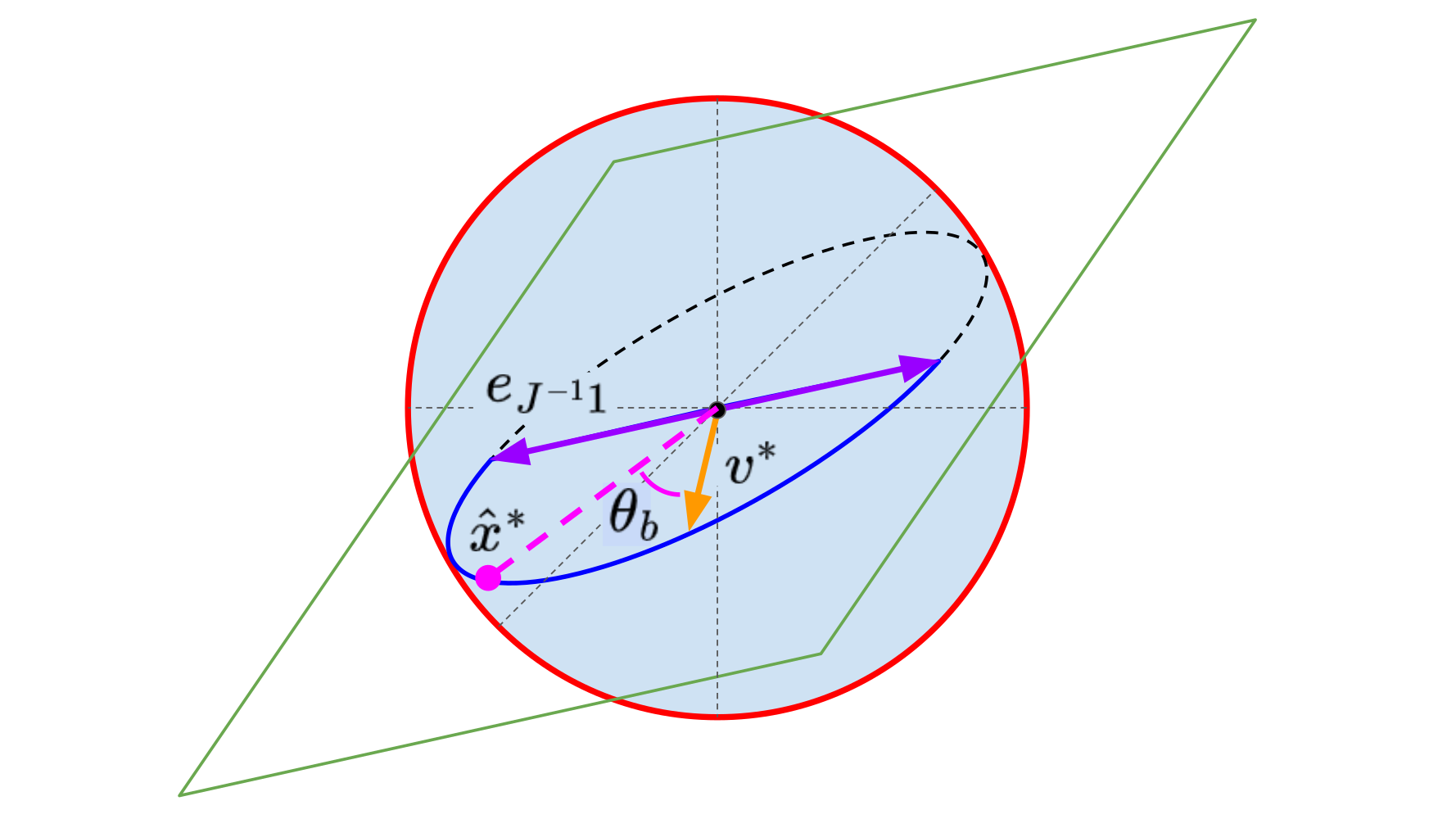
A geometric view of the interlacing argument for distributed allocation in networks with specific structure.
A geometric view of the convergence of the parameter estimates in models with null space-based parameterizations.
Randomized Simulation
In some cases, randomized simulations are the only practical evidence that a new technique will perform well in the real world.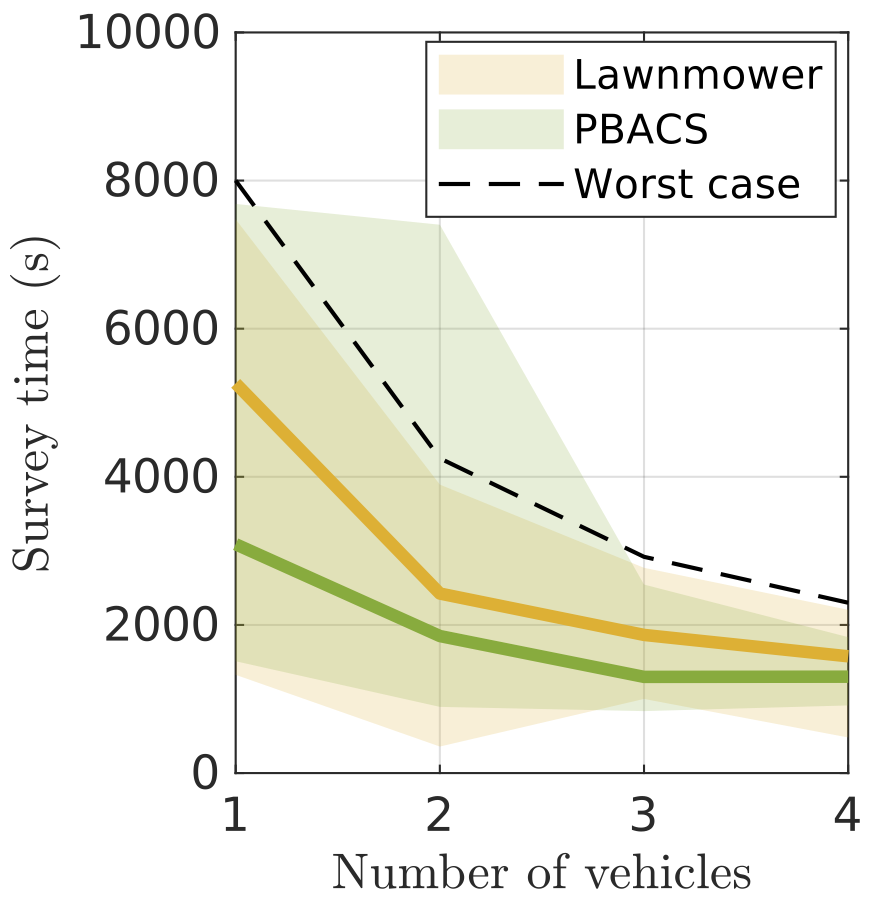
Performance of multi-robot channel search in randomized simulation with increasing group size. Lawnmowers are hard to beat on average!
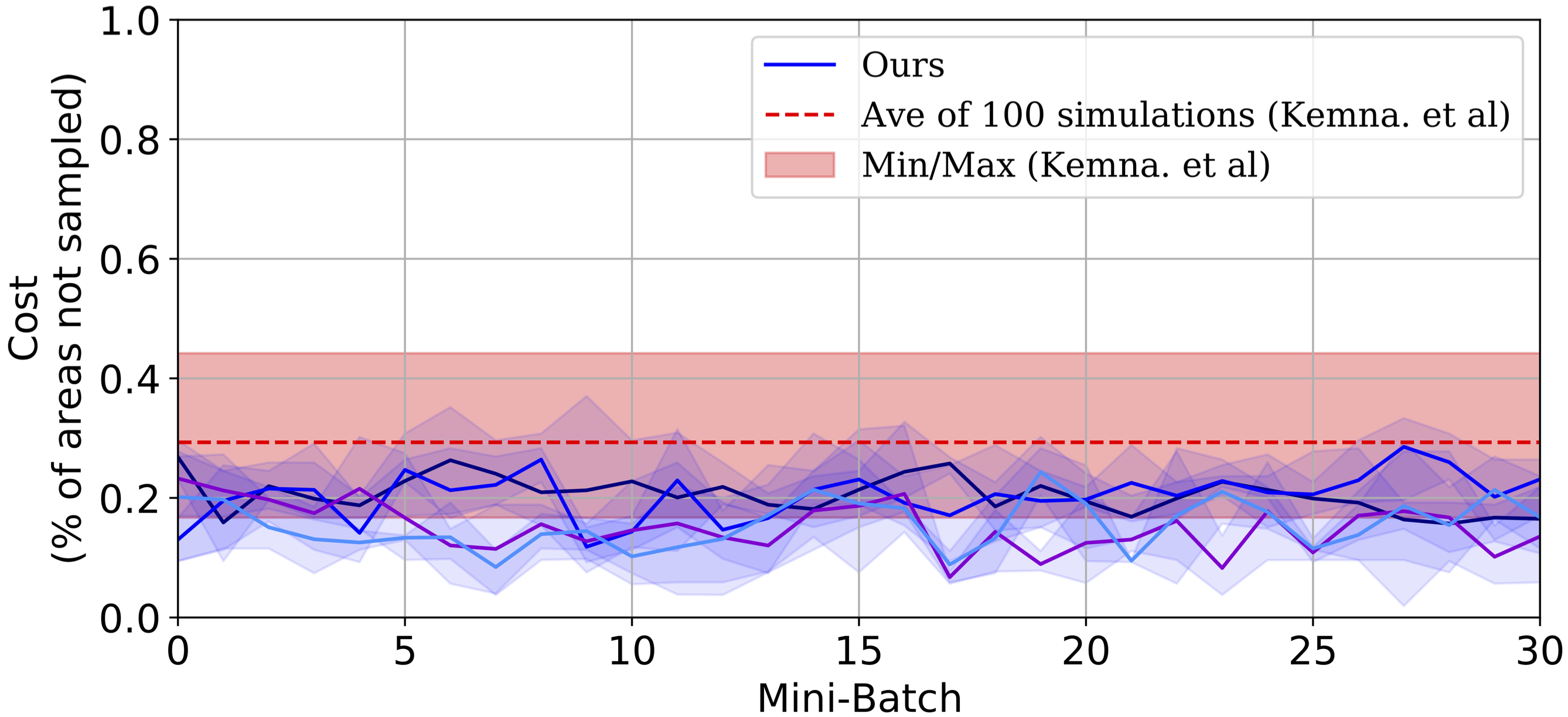
Evolution of performance in multi-USV cooperative adaptive sampling during several trials of vanilla policy gradient to optimize parameters in multi-robot model. We can only squeeze out a bit more performance by using RL to find the right parameters.
Application to Marine Robotics
The only way to validate models and analysis is through real robotic system deployments. Moreover, real-world deployments are essential for delivering on the promise of increased scientific data collection and reduced risk to human life. I leverage my experience as a licensed machine design engineer to develop a range of marine robots, including unmanned surface vehicles, autonomous underwater vehicles, and hull-crawling robots.
MIT fleet of Clearpath Heron USVs .

Heron USVs shadowing the launch boat.

Surveyors prepared for beach launch as part of the AI Strategic Challenge 2023 Event.

Team of Heron USVs completing a collaborative bathymetry survey.
Fleet of Surveyor USVs compete in a game of capture-the-flag at West Point.

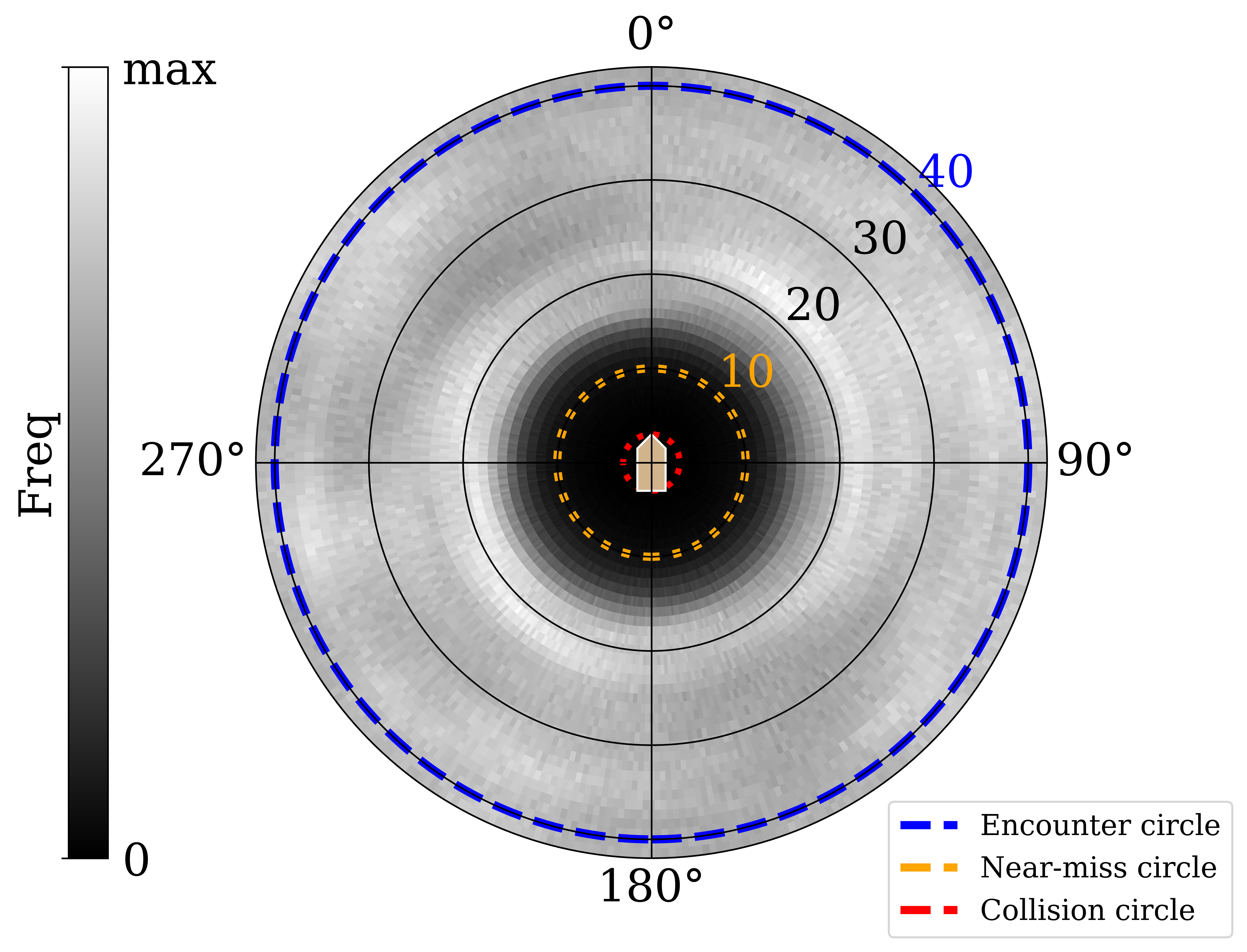
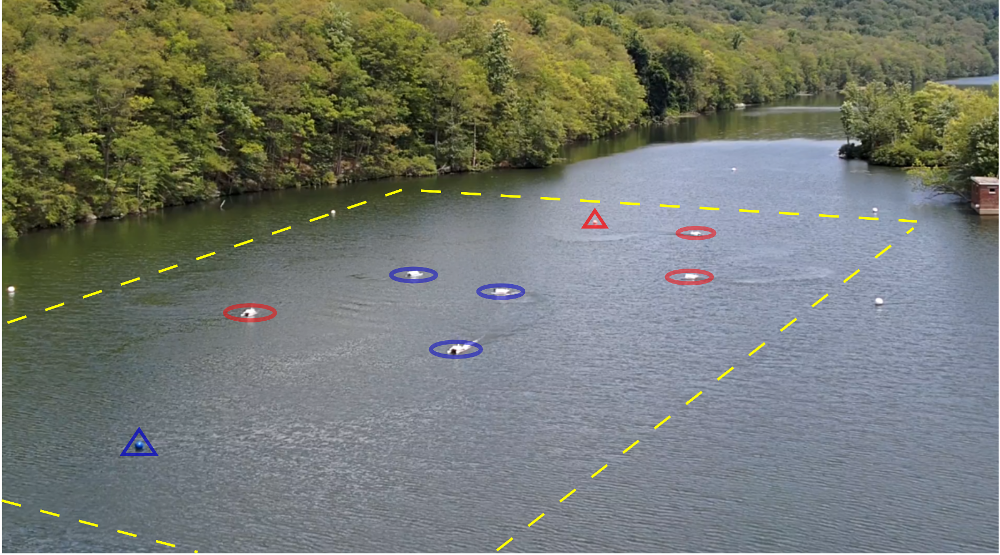
Test of collaborative autonomy for high value unit (HVU) protection with dynamic rotation of patrolling USVs.

Modified ICM soft robot crawler surveying a hull in a shipyard.

JHU Iver3 used for system identification.